除了训练/测试脚本,我们还在 tools/ 目录下提供了许多有用的工具。
日志分析¶
tools/analysis_tools/analyze_logs.py 根据训练日志文件绘制损失/mAP 曲线。请先运行 pip install seaborn 来安装依赖项。
python tools/analysis_tools/analyze_logs.py plot_curve [--keys ${KEYS}] [--eval-interval ${EVALUATION_INTERVAL}] [--title ${TITLE}] [--legend ${LEGEND}] [--backend ${BACKEND}] [--style ${STYLE}] [--out ${OUT_FILE}]
示例
绘制某个运行的分类损失。
python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys loss_cls --legend loss_cls
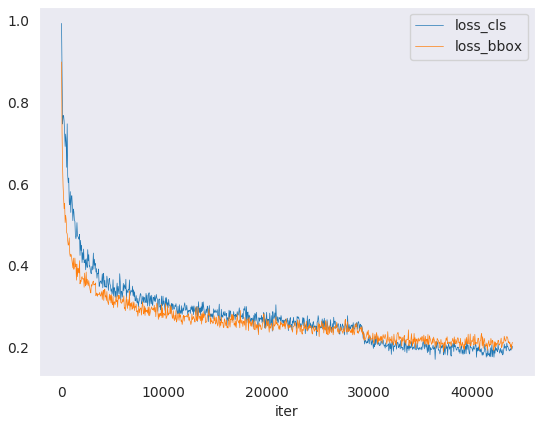
绘制某个运行的分类和回归损失,并将图形保存为 pdf。
python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys loss_cls loss_bbox --out losses.pdf
在同一张图中比较两个运行的 bbox mAP。
python tools/analysis_tools/analyze_logs.py plot_curve log1.json log2.json --keys bbox_mAP --legend run1 run2
计算平均训练速度。
python tools/analysis_tools/analyze_logs.py cal_train_time log.json [--include-outliers]
预计输出类似于以下内容。
-----Analyze train time of work_dirs/some_exp/20190611_192040.log.json----- slowest epoch 11, average time is 1.2024 fastest epoch 1, average time is 1.1909 time std over epochs is 0.0028 average iter time: 1.1959 s/iter
结果分析¶
tools/analysis_tools/analyze_results.py 计算单张图像的 mAP,并根据预测结果保存或显示得分最高和最低的 topk 图像。
用法
python tools/analysis_tools/analyze_results.py \
${CONFIG} \
${PREDICTION_PATH} \
${SHOW_DIR} \
[--show] \
[--wait-time ${WAIT_TIME}] \
[--topk ${TOPK}] \
[--show-score-thr ${SHOW_SCORE_THR}] \
[--cfg-options ${CFG_OPTIONS}]
所有参数的描述
config: 模型配置文件的路径。prediction_path: 来自tools/test.py的 pickle 格式的输出结果文件show_dir: 将绘制的 GT 和检测图像保存到的目录--show: 确定是否显示绘制的图像,如果未指定,则将其设置为False--wait-time: 显示的间隔 (s),0 为阻塞--topk: 排序后保存得分最高和最低topk得分的图像数量。如果未指定,则将其设置为20。--show-score-thr: 显示分数阈值。如果未指定,则将其设置为0。--cfg-options: 如果指定,则键值对可选 cfg 将合并到配置文件中
示例:
假设您已从 tools/test.py 中在路径 ‘./result.pkl’ 中获得了 pickle 格式的结果文件。
测试 Faster R-CNN 并可视化结果,将图像保存到目录
results/
python tools/analysis_tools/analyze_results.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
result.pkl \
results \
--show
测试 Faster R-CNN 并将 topk 指定为 50,将图像保存到目录
results/
python tools/analysis_tools/analyze_results.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
result.pkl \
results \
--topk 50
如果您想过滤低得分预测结果,可以指定
show-score-thr参数
python tools/analysis_tools/analyze_results.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
result.pkl \
results \
--show-score-thr 0.3
合并来自多个模型的结果¶
tools/analysis_tools/fusion_results.py 可以使用来自不同目标检测模型的加权框融合 (WBF) 来融合预测。(目前仅支持 coco 格式)
用法
python tools/analysis_tools/fuse_results.py \
${PRED_RESULTS} \
[--annotation ${ANNOTATION}] \
[--weights ${WEIGHTS}] \
[--fusion-iou-thr ${FUSION_IOU_THR}] \
[--skip-box-thr ${SKIP_BOX_THR}] \
[--conf-type ${CONF_TYPE}] \
[--eval-single ${EVAL_SINGLE}] \
[--save-fusion-results ${SAVE_FUSION_RESULTS}] \
[--out-dir ${OUT_DIR}]
所有参数的描述
pred-results: 来自不同模型的检测结果的路径。(目前仅支持 coco 格式)--annotation: 真值路径。--weights: 每个模型的权重列表。默认值:None,这意味着每个模型的权重 == 1。--fusion-iou-thr: 框匹配所需的 IoU 值。默认值:0.55。--skip-box-thr: WBF 算法中需要排除的置信度阈值。置信度低于此值的边界框将被排除。默认值:0。--conf-type: 如何计算加权框中的置信度。avg: 平均值,默认值。max: 最大值。box_and_model_avg: 盒子级和模型级的混合加权平均值。absent_model_aware_avg: 考虑了缺失模型的加权平均值。
--eval-single: 是否评估每个单个模型。默认值:False。--save-fusion-results: 是否保存融合结果。默认值:False。--out-dir: 融合结果的路径。
示例: 假设您已通过 tools/test.py 从相应的模型中获得了 3 个结果文件,其路径分别为 ‘./faster-rcnn_r50-caffe_fpn_1x_coco.json’,‘./retinanet_r50-caffe_fpn_1x_coco.json’,‘./cascade-rcnn_r50-caffe_fpn_1x_coco.json’。真值文件路径为 ‘./annotation.json’。
合并来自三个模型的预测并评估其有效性
python tools/analysis_tools/fuse_results.py \
./faster-rcnn_r50-caffe_fpn_1x_coco.json \
./retinanet_r50-caffe_fpn_1x_coco.json \
./cascade-rcnn_r50-caffe_fpn_1x_coco.json \
--annotation ./annotation.json \
--weights 1 2 3 \
同时评估每个单个模型和融合结果
python tools/analysis_tools/fuse_results.py \
./faster-rcnn_r50-caffe_fpn_1x_coco.json \
./retinanet_r50-caffe_fpn_1x_coco.json \
./cascade-rcnn_r50-caffe_fpn_1x_coco.json \
--annotation ./annotation.json \
--weights 1 2 3 \
--eval-single
合并来自三个模型的预测结果并保存
python tools/analysis_tools/fuse_results.py \
./faster-rcnn_r50-caffe_fpn_1x_coco.json \
./retinanet_r50-caffe_fpn_1x_coco.json \
./cascade-rcnn_r50-caffe_fpn_1x_coco.json \
--annotation ./annotation.json \
--weights 1 2 3 \
--save-fusion-results \
--out-dir outputs/fusion
可视化¶
可视化数据集¶
tools/analysis_tools/browse_dataset.py 帮助用户直观地浏览检测数据集(图像和边界框注释),或将图像保存到指定目录。
python tools/analysis_tools/browse_dataset.py ${CONFIG} [-h] [--skip-type ${SKIP_TYPE[SKIP_TYPE...]}] [--output-dir ${OUTPUT_DIR}] [--not-show] [--show-interval ${SHOW_INTERVAL}]
可视化预测¶
如果您需要一个轻量级 GUI 来可视化检测结果,可以参考 DetVisGUI 项目。
错误分析¶
tools/analysis_tools/coco_error_analysis.py 按类别和不同的标准分析 COCO 结果。它还可以绘制图表以提供有用的信息。
python tools/analysis_tools/coco_error_analysis.py ${RESULT} ${OUT_DIR} [-h] [--ann ${ANN}] [--types ${TYPES[TYPES...]}]
示例
假设您已在路径 ‘checkpoint’ 中获得了 Mask R-CNN 检查点文件。对于其他检查点,请参考我们的 模型库。
您可以修改 test_evaluator 以通过以下方式保存结果 bbox
找到当前配置对应的“configs/base/datasets”中的数据集。
将数据集配置注释中的原始 test_evaluator 和 test_dataloader 替换为 test_evaluator 和 test_dataloader。
使用以下命令获取结果 bbox 和分割 json 文件。
python tools/test.py \
configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py \
checkpoint/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth \
获取每个类别的 COCO bbox 错误结果,并将分析结果图像保存到目录(在 config 中,默认目录为“./work_dirs/coco_instance/test”)。
python tools/analysis_tools/coco_error_analysis.py \
results.bbox.json \
results \
--ann=data/coco/annotations/instances_val2017.json \
获取每个类别的 COCO 分割错误结果,并将分析结果图像保存到目录。
python tools/analysis_tools/coco_error_analysis.py \
results.segm.json \
results \
--ann=data/coco/annotations/instances_val2017.json \
--types='segm'
模型服务¶
为了使用 TorchServe 提供 MMDetection 模型,您可以按照以下步骤操作
1. 安装 TorchServe¶
假设您有一个已成功安装 PyTorch 和 MMDetection 的 Python 环境,那么您可以运行以下命令安装 TorchServe 及其依赖项。有关其他安装选项,请参阅 快速入门。
python -m pip install torchserve torch-model-archiver torch-workflow-archiver nvgpu
注意:如果您想在 docker 中使用 TorchServe,请参阅 torchserve docker。
2. 将模型从 MMDetection 转换为 TorchServe¶
python tools/deployment/mmdet2torchserve.py ${CONFIG_FILE} ${CHECKPOINT_FILE} \
--output-folder ${MODEL_STORE} \
--model-name ${MODEL_NAME}
3. 启动 TorchServe¶
torchserve --start --ncs \
--model-store ${MODEL_STORE} \
--models ${MODEL_NAME}.mar
4. 测试部署¶
curl -O curl -O https://raw.githubusercontent.com/pytorch/serve/master/docs/images/3dogs.jpg
curl http://127.0.0.1:8080/predictions/${MODEL_NAME} -T 3dogs.jpg
您应该获得类似的响应
[
{
"class_label": 16,
"class_name": "dog",
"bbox": [
294.63409423828125,
203.99111938476562,
417.048583984375,
281.62744140625
],
"score": 0.9987992644309998
},
{
"class_label": 16,
"class_name": "dog",
"bbox": [
404.26019287109375,
126.0080795288086,
574.5091552734375,
293.6662292480469
],
"score": 0.9979367256164551
},
{
"class_label": 16,
"class_name": "dog",
"bbox": [
197.2144775390625,
93.3067855834961,
307.8505554199219,
276.7560119628906
],
"score": 0.993338406085968
}
]
比较结果¶
您可以使用 test_torchserver.py 比较 TorchServe 和 PyTorch 的结果,并进行可视化。
python tools/deployment/test_torchserver.py ${IMAGE_FILE} ${CONFIG_FILE} ${CHECKPOINT_FILE} ${MODEL_NAME}
[--inference-addr ${INFERENCE_ADDR}] [--device ${DEVICE}] [--score-thr ${SCORE_THR}] [--work-dir ${WORK_DIR}]
示例
python tools/deployment/test_torchserver.py \
demo/demo.jpg \
configs/yolo/yolov3_d53_8xb8-320-273e_coco.py \
checkpoint/yolov3_d53_320_273e_coco-421362b6.pth \
yolov3 \
--work-dir ./work-dir
5. 停止 TorchServe¶
torchserve --stop
模型复杂度¶
tools/analysis_tools/get_flops.py 是一个从 flops-counter.pytorch 改编的脚本,用于计算给定模型的 FLOPs 和参数。
python tools/analysis_tools/get_flops.py ${CONFIG_FILE} [--shape ${INPUT_SHAPE}]
您将获得如下结果。
==============================
Input shape: (3, 1280, 800)
Flops: 239.32 GFLOPs
Params: 37.74 M
==============================
注意:此工具仍处于实验阶段,我们不保证数字完全正确。您可以将结果用于简单的比较,但在技术报告或论文中采用之前请仔细检查。
FLOPs 与输入形状相关,而参数则无关。默认输入形状为 (1, 3, 1280, 800)。
一些运算符不会计入 FLOPs,例如 GN 和自定义运算符。有关详细信息,请参阅
mmcv.cnn.get_model_complexity_info()。两阶段检测器的 FLOPs 取决于提案的数量。
模型转换¶
MMDetection 1.x 模型到 MMDetection 2.x¶
tools/model_converters/upgrade_model_version.py 将之前的 MMDetection 检查点升级到新版本。请注意,此脚本无法保证正常工作,因为新版本中引入了某些重大更改。建议直接使用新的检查点。
python tools/model_converters/upgrade_model_version.py ${IN_FILE} ${OUT_FILE} [-h] [--num-classes NUM_CLASSES]
RegNet 模型到 MMDetection¶
tools/model_converters/regnet2mmdet.py 将 pycls 预训练的 RegNet 模型中的键转换为 MMDetection 风格。
python tools/model_converters/regnet2mmdet.py ${SRC} ${DST} [-h]
Detectron ResNet 到 Pytorch¶
tools/model_converters/detectron2pytorch.py 将原始 detectron 预训练的 ResNet 模型中的键转换为 PyTorch 风格。
python tools/model_converters/detectron2pytorch.py ${SRC} ${DST} ${DEPTH} [-h]
准备发布模型¶
tools/model_converters/publish_model.py 帮助用户准备发布其模型。
在将模型上传到 AWS 之前,您可能需要
将模型权重转换为 CPU 张量
删除优化器状态
计算检查点文件的哈希值,并将哈希 ID 附加到文件名。
python tools/model_converters/publish_model.py ${INPUT_FILENAME} ${OUTPUT_FILENAME}
例如:
python tools/model_converters/publish_model.py work_dirs/faster_rcnn/latest.pth faster_rcnn_r50_fpn_1x_20190801.pth
最终输出文件名将为 faster_rcnn_r50_fpn_1x_20190801-{hash id}.pth。
数据集转换¶
tools/data_converters/ 包含将 Cityscapes 数据集和 Pascal VOC 数据集转换为 COCO 格式的工具。
python tools/dataset_converters/cityscapes.py ${CITYSCAPES_PATH} [-h] [--img-dir ${IMG_DIR}] [--gt-dir ${GT_DIR}] [-o ${OUT_DIR}] [--nproc ${NPROC}]
python tools/dataset_converters/pascal_voc.py ${DEVKIT_PATH} [-h] [-o ${OUT_DIR}]
数据集下载¶
tools/misc/download_dataset.py 支持下载 COCO、VOC 和 LVIS 等数据集。
python tools/misc/download_dataset.py --dataset-name coco2017
python tools/misc/download_dataset.py --dataset-name voc2007
python tools/misc/download_dataset.py --dataset-name lvis
对于中国用户,这些数据集也可以从 OpenDataLab 高速下载
基准测试¶
鲁棒检测基准测试¶
tools/analysis_tools/test_robustness.py 和 tools/analysis_tools/robustness_eval.py 帮助用户评估模型的鲁棒性。核心思想来自 Benchmarking Robustness in Object Detection: Autonomous Driving when Winter is Coming。有关如何在损坏的图像上评估模型以及一组标准模型的结果,请参阅 robustness_benchmarking.md。
FPS 基准测试¶
tools/analysis_tools/benchmark.py 帮助用户计算 FPS。FPS 值包括模型正向传播和后处理。为了获得更准确的值,目前仅支持单 GPU 分布式启动模式。
python -m torch.distributed.launch --nproc_per_node=1 --master_port=${PORT} tools/analysis_tools/benchmark.py \
${CONFIG} \
[--checkpoint ${CHECKPOINT}] \
[--repeat-num ${REPEAT_NUM}] \
[--max-iter ${MAX_ITER}] \
[--log-interval ${LOG_INTERVAL}] \
--launcher pytorch
示例:假设您已将 Faster R-CNN 模型检查点下载到 checkpoints/ 目录。
python -m torch.distributed.launch --nproc_per_node=1 --master_port=29500 tools/analysis_tools/benchmark.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth \
--launcher pytorch
其他¶
评估指标¶
tools/analysis_tools/eval_metric.py 根据配置文件评估 pkl 结果文件的某些指标。
python tools/analysis_tools/eval_metric.py ${CONFIG} ${PKL_RESULTS} [-h] [--format-only] [--eval ${EVAL[EVAL ...]}]
[--cfg-options ${CFG_OPTIONS [CFG_OPTIONS ...]}]
[--eval-options ${EVAL_OPTIONS [EVAL_OPTIONS ...]}]
打印完整配置¶
tools/misc/print_config.py 按原样打印整个配置,扩展其所有导入项。
python tools/misc/print_config.py ${CONFIG} [-h] [--options ${OPTIONS [OPTIONS...]}]
超参数优化¶
YOLO 锚点优化¶
tools/analysis_tools/optimize_anchors.py 提供两种优化 YOLO 锚点的方法。
一种是 k 均值锚点聚类,它来自 darknet。
python tools/analysis_tools/optimize_anchors.py ${CONFIG} --algorithm k-means --input-shape ${INPUT_SHAPE [WIDTH HEIGHT]} --output-dir ${OUTPUT_DIR}
另一种是使用差分进化来优化锚点。
python tools/analysis_tools/optimize_anchors.py ${CONFIG} --algorithm differential_evolution --input-shape ${INPUT_SHAPE [WIDTH HEIGHT]} --output-dir ${OUTPUT_DIR}
例如:
python tools/analysis_tools/optimize_anchors.py configs/yolo/yolov3_d53_8xb8-320-273e_coco.py --algorithm differential_evolution --input-shape 608 608 --device cuda --output-dir work_dirs
您将获得
loading annotations into memory...
Done (t=9.70s)
creating index...
index created!
2021-07-19 19:37:20,951 - mmdet - INFO - Collecting bboxes from annotation...
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 117266/117266, 15874.5 task/s, elapsed: 7s, ETA: 0s
2021-07-19 19:37:28,753 - mmdet - INFO - Collected 849902 bboxes.
differential_evolution step 1: f(x)= 0.506055
differential_evolution step 2: f(x)= 0.506055
......
differential_evolution step 489: f(x)= 0.386625
2021-07-19 19:46:40,775 - mmdet - INFO Anchor evolution finish. Average IOU: 0.6133754253387451
2021-07-19 19:46:40,776 - mmdet - INFO Anchor differential evolution result:[[10, 12], [15, 30], [32, 22], [29, 59], [61, 46], [57, 116], [112, 89], [154, 198], [349, 336]]
2021-07-19 19:46:40,798 - mmdet - INFO Result saved in work_dirs/anchor_optimize_result.json
混淆矩阵¶
混淆矩阵是预测结果的摘要。
tools/analysis_tools/confusion_matrix.py 可以分析预测结果并绘制混淆矩阵表。
首先,运行 tools/test.py 保存 .pkl 检测结果。
然后,运行
python tools/analysis_tools/confusion_matrix.py ${CONFIG} ${DETECTION_RESULTS} ${SAVE_DIR} --show
您将获得一个混淆矩阵,如下所示

COCO 分离和遮挡掩码指标¶
检测遮挡物体对于最先进的目标检测器来说仍然是一个挑战。我们实现了论文 A Tri-Layer Plugin to Improve Occluded Detection 中提出的指标来计算分离和遮挡掩码的召回率。
使用此指标有两种方法
离线评估¶
我们提供一个脚本,使用转储的预测文件来计算指标。
首先,使用 tools/test.py 脚本转储检测结果
python tools/test.py ${CONFIG} ${MODEL_PATH} --out results.pkl
然后,运行 tools/analysis_tools/coco_occluded_separated_recall.py 脚本获取分离和遮挡掩码的召回率
python tools/analysis_tools/coco_occluded_separated_recall.py results.pkl --out occluded_separated_recall.json
输出应如下所示
loading annotations into memory...
Done (t=0.51s)
creating index...
index created!
processing detection results...
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 5000/5000, 109.3 task/s, elapsed: 46s, ETA: 0s
computing occluded mask recall...
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 5550/5550, 780.5 task/s, elapsed: 7s, ETA: 0s
COCO occluded mask recall: 58.79%
COCO occluded mask success num: 3263
computing separated mask recall...
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 3522/3522, 778.3 task/s, elapsed: 5s, ETA: 0s
COCO separated mask recall: 31.94%
COCO separated mask success num: 1125
+-----------+--------+-------------+
| mask type | recall | num correct |
+-----------+--------+-------------+
| occluded | 58.79% | 3263 |
| separated | 31.94% | 1125 |
+-----------+--------+-------------+
Evaluation results have been saved to occluded_separated_recall.json.
在线评估¶
我们实现了 CocoOccludedSeparatedMetric,它继承自 CocoMetic。要在训练期间评估分离和遮挡掩码的召回率,只需在您的配置中将评估器指标类型替换为 'CocoOccludedSeparatedMetric'
val_evaluator = dict(
type='CocoOccludedSeparatedMetric', # modify this
ann_file=data_root + 'annotations/instances_val2017.json',
metric=['bbox', 'segm'],
format_only=False)
test_evaluator = val_evaluator
如果您使用此指标,请引用该论文
@article{zhan2022triocc,
title={A Tri-Layer Plugin to Improve Occluded Detection},
author={Zhan, Guanqi and Xie, Weidi and Zisserman, Andrew},
journal={British Machine Vision Conference},
year={2022}
}